Американские ученые сконструировали 3D-печатного робота-шагохода с пневматическим приводом
7 апреля 2025 год
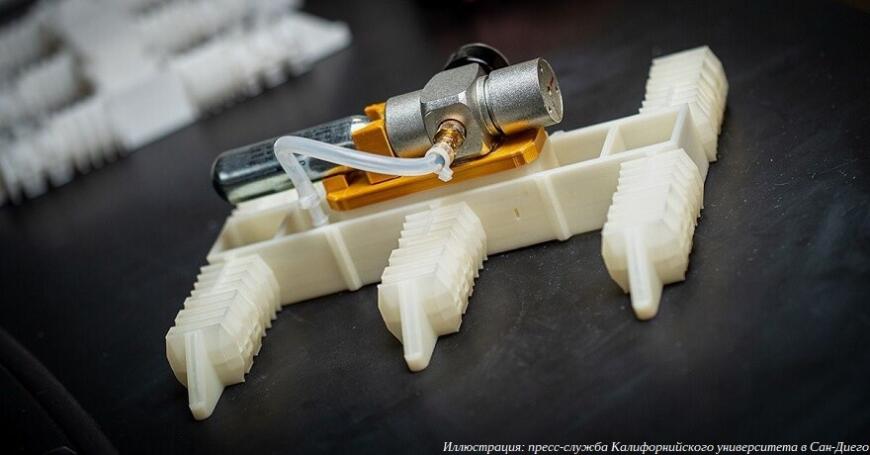
Несущую конструкцию и приводы можно напечатать на 3D-принтере целиком, за один прием, а для работы аппарата не требуется электроника. Нужен лишь баллончик с углекислым газом.
Проект выполнен сотрудниками лаборатории бионической робототехники Калифорнийского университета в Сан-Диего. Прототип изготовлен на обычном настольном экструзионном (FDM) 3D-принтере с использованием коммерчески доступного филамента. Так как речь идет о мягкой робототехнике, конструкторы использовали термопластичные эластомеры.
Очевидно, навигационные возможности такой системы сильно ограничены. С другой стороны, она будет работать в условиях, малопригодных для эксплуатации электронных систем, например в зонах с высоким радиационным фоном. Конструкция при этом максимально дешева и с легкостью изготавливается даже на недорогих FDM 3D-принтерах любительского класса.
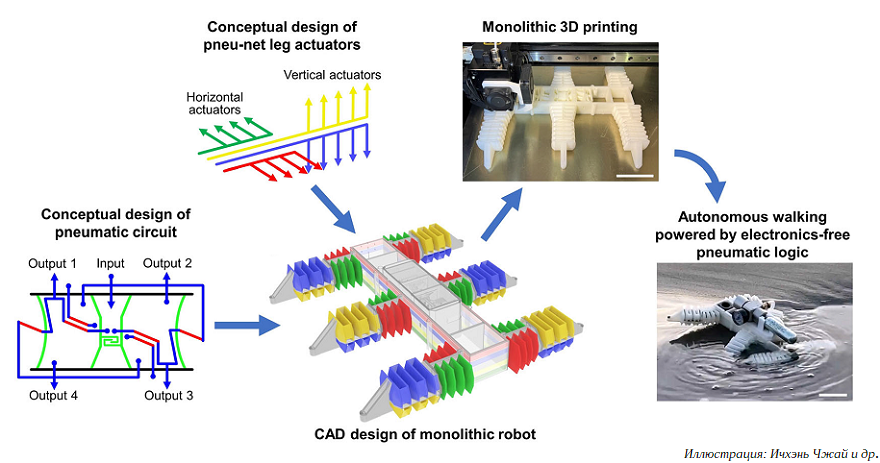
Главная хитрость — контролируемое, переменное распределение давления в пневматической системе. Подача газа регулируется встроенным пневматическим осциллятором — механическим устройством, работающим подобно паровым машинам. Устройство попеременно нагружает давлением три пары ног, подвижных в вертикальной и горизонтальной плоскости.
Ресурс 3D-печатного робота достаточно высок: в ходе лабораторных экспериментов образец из термопластичного полиуретана твердостью 80 по шкале Шора A выдержал более двадцати тысяч циклов, причем после десятичасового отдыха работоспособность восстанавливалась, так как благодаря упругости материала деформации не были пластическими, то есть необратимыми. Второй вариант робота напечатали еще более мягким и эластичным термоэластопластом, получив уже единовременный ресурс в районе ста восьмидесяти тысяч циклов, опять-таки без необратимых деформаций и с восстановлением работоспособности после отдыха.

Проблема скорее в запасе энергии, так как одного баллончика хватает примерно на восемьдесят секунд движения. Масса подвижной конструкции составляет 173 грамма, баллончик и регулятор добавляют еще двести грамм. Более продолжительная работа требует уже внешнего питания. При подключении к компрессору аппарат развивал максимальную скорость в районе семи сантиметров в секунду. На практике максимальная скорость ограничена давлением, так как чрезмерно высокие нагрузки вызывают деформации клапанов. Для повышения автономности рассматривается возможность использования встроенных химических газогенераторов, например на основе сухого льда.
Прототипы продемонстрировали способность передвигаться по твердым покрытиям, грунту и песку, а при необходимости даже ползать под водой. В одном из испытаний робот успешно прополз по песку на пляже, влез в глубокую лужу, прошел по дну и выкарабкался обратно на поверхность. В другом тесте машина преодолела семьдесят три сантиметров вверх по песчано-каменистой горке с наклоном в восемнадцать градусов.
Шестиногую конструкцию инженеры посчитали оптимальной, так как четырехногие варианты не обеспечивают необходимую проходимость, а роботы с восемью и более конечностями страдали бы от потери скорости из-за необходимости в последовательной активации дополнительных ног.
С докладом научной команды можно ознакомиться в журнале Advanced Intelligent Systems.
Источник: https://3dtoday.ru/blogs/news3dtoday/amerikanskie-ucenye-skonstruirovali-3d-pecatnogo-robota-sagoxoda-s-pnevmaticeskim-privodom